
3D-Scanner für modulare Erfassung, Rekonstruktion und Auswertung
Modularer 3D-Scanner für reproduzierbare 3D-Daten
Der Dat-inf 3D-Scanner ist als modulares Multi-Kamera-System aufgebaut und eignet sich für Anwendungen, bei denen Objekte, Bauteile oder Oberflächen als präzise 3D-Daten erfasst und anschließend ausgewertet werden sollen. Ziel ist nicht nur eine optisch ansprechende Rekonstruktion, sondern ein belastbarer Datenbestand für Analyse, Vermessung, Dokumentation und Qualitätsbewertung.
Durch den modularen Aufbau lässt sich der Scanner an unterschiedliche Aufgaben anpassen – von der kompakten Prüfstation bis zur größeren Messzelle. Damit eignet sich das System sowohl für Entwicklungs- und Forschungsumgebungen als auch für technische Anwendungen, bei denen Geometrie, Form, Lage oder Oberflächenstrukturen reproduzierbar erfasst werden sollen.
Typische Einsatzfelder
- 3D-Vermessung von Bauteilen, Proben und Objekten
- Erzeugung von Meshes für Analyse, Visualisierung oder Weiterverarbeitung
- Vergleich von Geometrien gegen Sollzustände oder Referenzdaten
- Erfassung komplexer Formen mit mehreren Kameraperspektiven
- Dokumentation von Objektzuständen und Oberflächen
Was an der Lösung wichtig ist
- Modularer Aufbau statt starrer Einzweck-Hardware
- Skalierbarkeit über frei kombinierbare Stereo-Module
- Softwaregestützte Rekonstruktion mit MVS-Toolchain
- Weiterverarbeitung der 3D-Daten mit individueller Software
- Anpassbarkeit an Objektgröße, Genauigkeit und Prozessumgebung
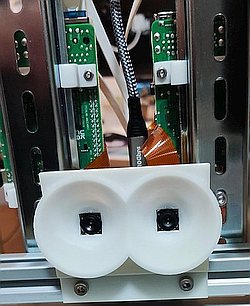
Modulares Kamerakonzept mit frei positionierbaren Stereo-Modulen
Als Sensoreinheiten verwenden wir Raspberry-Pi-Computer mit 64-Megapixel-Kameramodulen. Jeweils zwei Kameras bilden ein Stereo-Modul. Diese Module können mithilfe von Industrieprofilen und 3D-gedruckten Adaptern flexibel montiert und zu größeren Kamera-Arrays kombiniert werden. Dadurch entsteht ein 3D-Scanner, der sich an die Messaufgabe anpasst, statt die Messaufgabe an eine starre Hardware zu zwingen.


Die Anzahl und Geometrie der Module kann je nach Objektform, Sichtfeld und Zielgenauigkeit gewählt werden. Das ist besonders dann wichtig, wenn schwer zugängliche Bereiche erfasst werden müssen oder wenn ein Objekt aus mehreren Blickwinkeln sichtbar sein soll.
Durch die mechanisch stabile Integration und die definierte Kameraposition entsteht eine belastbare Basis für die spätere Rekonstruktion. Genau diese Kombination aus Aufbau, Kalibrierung und Software entscheidet darüber, ob ein 3D-Scanner im Alltag wirklich reproduzierbare Ergebnisse liefert.
- Skalierbar: Anzahl und Anordnung der Stereo-Module nach Aufgabe konfigurierbar
- Flexibel integrierbar: Montage über Industrieprofile und 3D-gedruckte Halter
- Stabil auslegbar: geeignet für definierte, reproduzierbare Kamerapositionen
- Erweiterbar: Kamera-Array kann an neue Aufgaben angepasst werden
Was für eine robuste 3D-Rekonstruktion wichtig ist
Die 3D-Daten entstehen aus den Bildern des Multi-Kamera-Rigs durch eine 3D-Rekonstruktion mit mehreren Ansichten. Damit dieser Prozess zuverlässig funktioniert, müssen sowohl der Aufbau als auch das Objekt selbst bestimmte Voraussetzungen erfüllen.
Geometrische Voraussetzungen
- Mehrfachsichtbarkeit: Jeder relevante Objektpunkt sollte von mindestens drei Kameras erfasst werden
- Ausreichende Überlappung: Die Perspektiven müssen genug gemeinsame Bildbereiche enthalten
- Stabile Kalibrierung: Kameraposition und Geometrie müssen reproduzierbar bekannt sein
- Passende Auflösung: Objektgröße, Abstand und Optik müssen zusammenpassen
Oberflächen und Material
- Strukturierte Oberflächen erleichtern das Bild-Matching deutlich
- Glatte oder homogene Flächen liefern oft zu wenige markante Merkmale
- Spiegelnde Materialien können die Rekonstruktion erschweren
- Hilfsmaßnahmen wie Mattierung, projizierte Muster oder Speckle-Textur können sinnvoll sein
Genau deshalb betrachten wir bei 3D-Projekten nie nur die Kamera-Hardware. Entscheidend ist immer das Zusammenspiel aus Objekt, Oberfläche, Beleuchtung, Kameraanordnung, Kalibrierung und Auswertung. Bei Bedarf prüfen wir diese Punkte im Rahmen einer Machbarkeitsprüfung vorab.
Software-Pipeline: von der Bildaufnahme zum Mesh
Für die Rekonstruktion setzen wir auf eine MVS-Toolchain (Multi-View Stereo). Die Aufnahme erfolgt mit den Kameramodulen, gesteuert über einen Windows-Rechner. Belichtungs- und Fokuseinstellungen können softwareseitig angepasst werden. Die rechenintensive Rekonstruktion läuft anschließend auf einem leistungsfähigen PC mit NVIDIA-GPU.
- Aufbau und Ausrichtung der Kamera- und Stereo-Module
- Kalibrierung und Aufnahme des Objekts
- Übertragung der Bilddaten an den Rekonstruktions-PC
- 3D-Rekonstruktion über die MVS-Toolchain
- Erzeugung einer Mesh-Datei für Analyse oder Weiterverarbeitung
- Optionale Auswertung mit individueller Software
Das Ergebnis ist nicht nur ein 3D-Modell, sondern eine Datengrundlage für nachgelagerte Schritte wie Geometrievergleich, Flächenanalyse, Lagebeurteilung oder Qualitätsbewertung. Damit wird der 3D-Scanner Teil eines technischen Prozesses und nicht nur ein Visualisierungswerkzeug.
Gerade in Kombination mit kundenspezifischer Software lassen sich 3D-Daten gezielt weiterverarbeiten, mit Referenzen vergleichen oder in größere Prüf- und Dokumentationsprozesse einbinden.
Praxisnahe Anwendungsfälle für den 3D-Scanner
3D-Erfassung für Geometrie- und Formanalyse
Wenn komplexe Bauteile oder Proben aus mehreren Blickwinkeln erfasst werden müssen, liefert ein modularer 3D-Scanner eine deutlich bessere Datengrundlage als einzelne Kameras oder isolierte Tiefensensoren. Die daraus entstehenden Meshes können anschließend vermessen, verglichen oder dokumentiert werden.
Mehrere Kameraperspektiven statt einer einzelnen Tiefenaufnahme
Bei größeren oder geometrisch anspruchsvollen Objekten reicht eine einzelne Ansicht oft nicht aus. Mehrere Kameraperspektiven helfen, verdeckte Bereiche besser zu erfassen und eine belastbarere Rekonstruktion zu erzeugen.
3D-Daten als Basis für individuelle Auswertung
Besonders interessant wird der 3D-Scanner dann, wenn die rekonstruierten Daten nicht nur gespeichert, sondern technisch ausgewertet werden sollen – etwa zur Ableitung von Maßen, Lagebeziehungen, Oberflächenmerkmalen oder Abweichungen gegenüber Referenzdaten.
Verbindung zu unseren weiteren Lösungen
Der 3D-Scanner steht nicht isoliert, sondern ergänzt unsere Themen rund um 3D-Bildverarbeitung, kamerabasierte Messsysteme und Bildverarbeitung. Dadurch lassen sich 3D-Daten direkt in Analyse- und Prüfumgebungen einbinden.
Auch eine Kombination mit bestehenden Anlagen ist möglich – etwa im Rahmen eines Retrofit, wenn zusätzliche optische Erfassung oder softwaregestützte Auswertung in vorhandene Abläufe integriert werden soll.
Häufige Fragen zum 3D-Scanner
Wofür eignet sich ein modularer 3D-Scanner besonders?
Besonders dann, wenn Objekte aus mehreren Richtungen erfasst und als belastbare 3D-Daten weiterverarbeitet werden sollen – etwa für Vermessung, Vergleich, Dokumentation oder Analyse.
Warum sind mehrere Kameras sinnvoll?
Mehrere Kameras erhöhen die Sichtbarkeit relevanter Objektbereiche und verbessern die Grundlage für die Rekonstruktion. Das ist vor allem bei komplexen Geometrien oder teilweise verdeckten Strukturen wichtig.
Welche Ausgabe erzeugt der 3D-Scanner?
Typischerweise entsteht eine Mesh-Datei, die anschließend visualisiert, ausgewertet oder in weitere Softwareprozesse übernommen werden kann.
Kann das System an eine konkrete Aufgabe angepasst werden?
Ja. Genau das ist ein zentraler Vorteil des modularen Aufbaus. Anzahl, Anordnung und Integration der Kamera-Module können auf Objekt, Genauigkeitsanforderung und Prozessumgebung abgestimmt werden.
Interesse an einem 3D-Scanner für Ihre Anwendung?
Gern besprechen wir mit Ihnen, welche Kamerakonfiguration, Sichtgeometrie und Rekonstruktionsstrategie für Ihren Anwendungsfall sinnvoll ist – inklusive Einschätzung zu Auflösung, Datenqualität und Weiterverarbeitung.